CoppeliaSim模擬與運送機構創建 <<
Previous Next >> 機械結構
CoppeliaSim模擬 手動操控機械手臂
整體運用重點:
- 向本週主軸:CoppeliaSim模擬與運送機構創建
整體運用重點:
1.lua 產生路徑
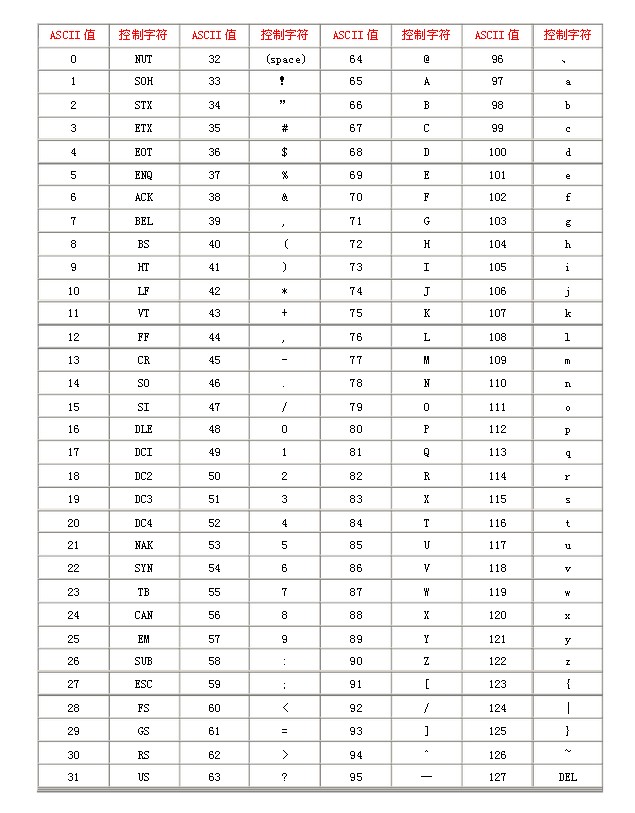
2.鍵盤ASCII控制字符
本週問題:
1.控制關節時,每個關節所設置的位置與阻尼參數不同,會有抖動的情形發生
2.關節2的部分因為承受整隻手臂的絕大重量,所以轉動到了一定角度後會因為自身重量而倒下
問題改善:
1.所有的參數都設成一樣的並把馬達改成控制模式
2.每隻關節都設置了轉動條件,限制轉動的次數,且設置了兩個參數控制互鎖,並用自身相加方式達成 可以重複接收訊號,另外關節2在關節與程式另有限制轉動的角度跟輸入次數,當按下按鍵一定次數 後 必須往反方向轉動,否則互鎖。
CoppeliaSim模擬與運送機構創建 <<
Previous Next >> 機械結構